
Selected Projects
Showcasing our portfolio of advanced technology solutions delivered across critical sectors.

Battle Tank Training Simulator
ZATNav has developed advanced 6-DOF training simulator software (DITS) for Al Zarar, Al Zarar-1, Al Khalid, and Al-Khalid-1 platforms, setting a new benchmark in indigenous defense simulation.

Vision Based Navigation
A prototype UAV autonomous navigation system operating in GNSS-denied zones using image processing, YOLO-based AI object detection, real-world coordinate calculation and inertial sensor integration.

Smart Elderly Patient Monitoring Using AI
An AI-powered remote health monitoring system designed for elderly patients, using real-time sensor data fusion, anomaly detection, and intelligent alerts to enable proactive care without hospitalization.

Simdent Dental Training Simulator
A high-fidelity dental procedure training simulator combining haptic feedback, 3D visualization, and real-time performance analytics to train dental students in safe, repeatable virtual environments.
GNSS-R (GNSS Reflectometry)
A GNSS Reflectometry system exploiting reflected GNSS signals to measure sea surface height, soil moisture, and vegetation biophysical parameters for remote sensing and environmental monitoring applications.
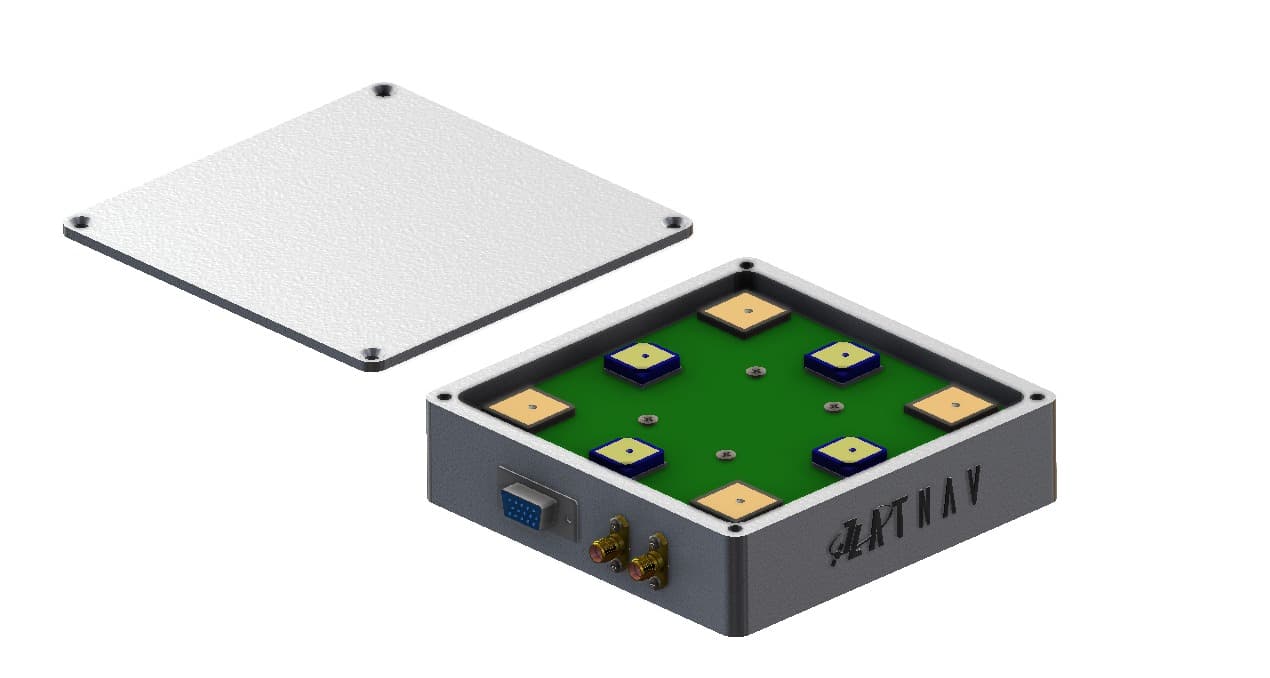
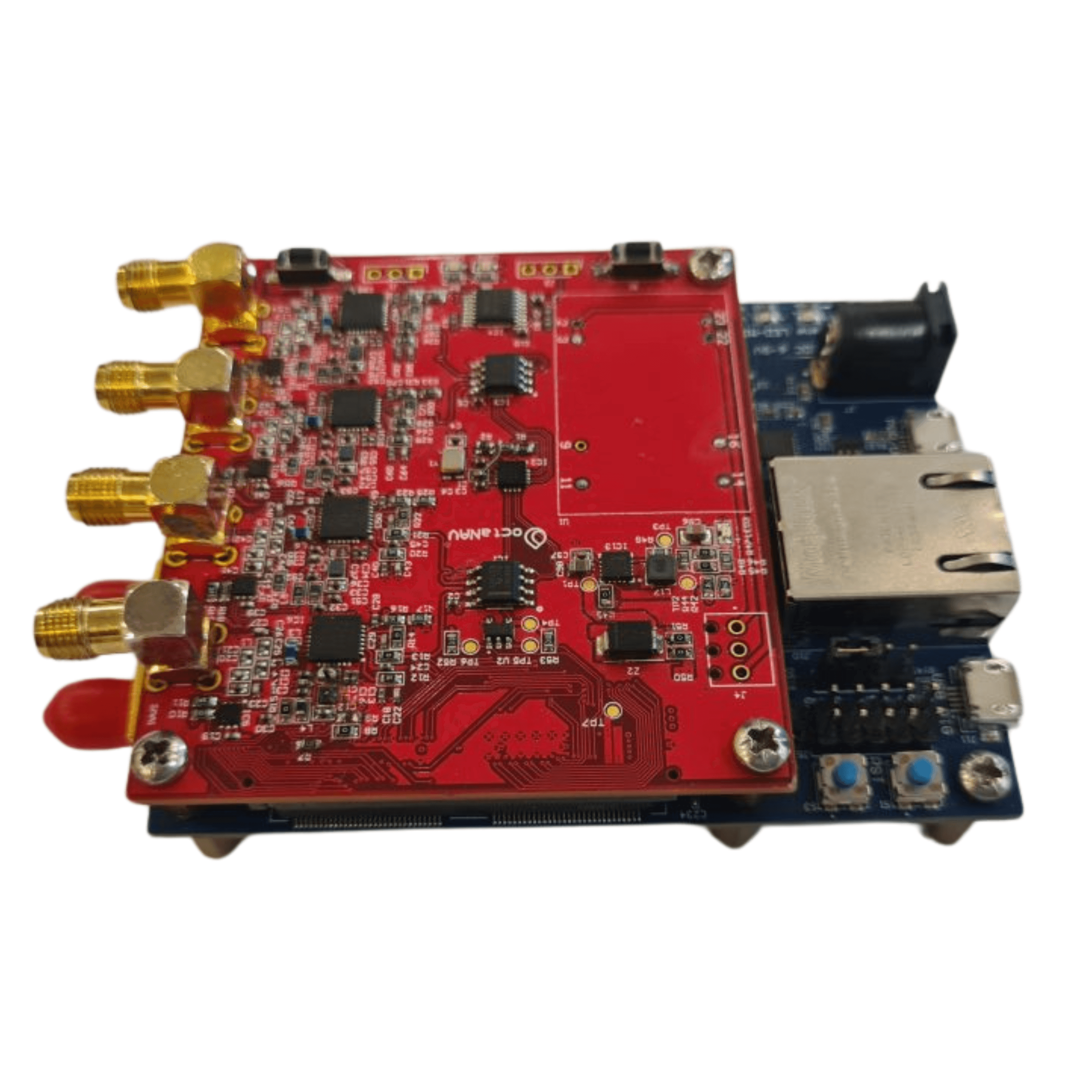
FPGA-Based Anti-Jamming System
A hardware–software co-designed solution aimed at enhancing the reliability of communication signals in environments affected by interference and intentional jamming, using multi-channel antenna architecture and advanced signal processing.

Hybrid Vision-Based Real-Time 6-DoF Pose Tracking
A real-time 6-DoF pose estimation system fusing visual inertial odometry with deep learning-based object detection to achieve millimeter-accurate pose tracking for augmented reality and autonomous systems.